|
The Smart TachographA Research Demo of the Distributed Systems GroupThe Smart Tachograph is a ubiquitous computing system that allows a fine-granular, real-time analysis and accounting of traffic costs. The project started from the insight that nowadays many of the traffic-related costs are not accounted to their originators, but rather spread across a larger group, mainly due to the impossibility of exact measurements. Ecology-oriented vehicle taxes, for example, typically depend on the vehicle's type (more polluting vehicles having to pay a higher tax). Such taxes fall short of fulfilling their ecological aim, however, since they do not take in account the annual mileage of the vehicle, neither the conditions in which the car is being driven, e.g. ozone levels. Likewise, today's car insurance schemes typically divide drivers into about two dozen different risk categories, using only a few criteria such as the driver's age, gender, driving experience, place of residence, or car model. While all these parameters are being determined before the insurance goes into effect, the actual behavior of the driver after signing the policy (e.g., a safe driving style) will reflect only slowly on his or her insurance rate, typically only after one or more years of accident-free driving. Moreover, since inside such a statical risk category the actual risks can still vary heavily, higher-risk drivers in a class are thus cross-financed by the lower-risk drivers. Through the use of ubiquitous computing technology, however, much of the data that has been previously unavailable might now easily be measured. According to the place, time, and way someone is driving, the economical and ecological costs as well as the risk of being involved in a traffic accident can be ascertained with a high degree of accuracy. The Smart Tachograph system allows to determine these momentarily costs and risks and to bill the drivers in a pay-per-use / pay-per-risk manner instead of flat. The Prototype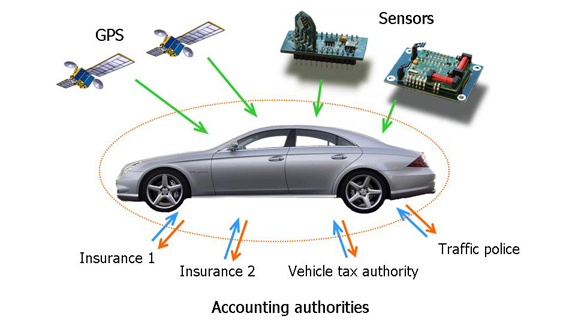
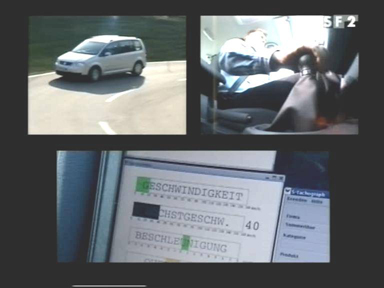
The Smart Tachograph prototype consists of several components. Sensors placed in the car gather data about the way and the circumstances in which the vehicle is being driven, this data is then analyzed on a computer to ascertain the according costs, and a software infrastructure serves as both back-end connection to various accounting entities as well as front-end interface to the vehicle's driver. SensorsA black box has been placed underneath the car's windshield. It contains a collection of sensors: a wireless GPS unit as well as a sensor board carrying two accelerometers (for longitudinal and cross acceleration), a temperature, and a light sensor. The data gathered by these sensors is sent via Bluetooth to a laptop computer running the Smart Tachograph's software. Software InfrastructureThe main role of the software infrastructure is to query data from the sensors (depicted above the car in the picture), and to mediate communication with several possible accounting places (these are depicted under the car). The software has been designed to be flexible, so that including new sensors or accounting entities becomes a trivial task. At the time being, we have included three different kinds of entities that might be interested in the manner the car is driven: insurance companies, the tax authority, and the police. These entities may charge the driver a usage-dependent insurance rate, road tax, and traffic fines respectively. The software infrastructure accomplishes several other tasks as well. When starting the system, it presents the driver the accounting places that must be active to be able to start the car. These could for example be the tax authority and/or the police and at least one insurance company. For the first two there is no option, but the insurer may be freely chosen. A service description and discovery protocol is therefore part of the software infrastructure. Insurers may publish several insurance schemes they offer. These will typically have a pretty low minimum per-kilometer insurance price, that will increase according to traffic, time and place of the ride, momentary acceleration, driven speed in relation to the speed limit, and others criteria. 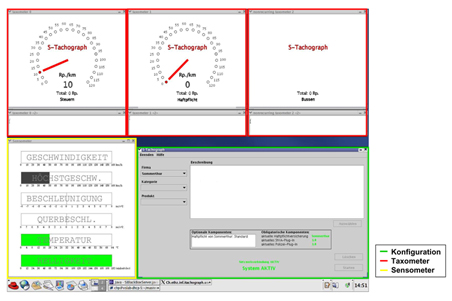
The Smart Tachograph's software further includes a front-end interface to the driver. This is depicted in the picture on the right. It consists of several windows:
Societal ImplicationsThe Smart Tachograph was developed with the explicit aim of showing what is already possible with today's technology and how far-reaching the consequences could be. A system such as the Smart Tachograph provides both chances (more fairness because people would pay for the costs they actually create which could in return make people drive more carefully and ecologically), but also heavy risks. We included the police module, that automatically issues traffic fines, to illustrate precisely such ideas. Furthermore, we wanted to show that ubiquitous computing systems can be implemented in more than one way. Although possible, we therefore did not choose to send all measured data online to the accounting entities. Instead, the data is analyzed locally on the vehicle's computer using a formula provided by the accounting places. These formulas are either enforced by law (e.g., the road pricing module), or have been issued by the insurer when the contract has been signed. The accounting entities ultimately receive only a sum at the end of the month that represents the costs that have been produced by the driver. Of course, all information being processed locally arises the risk of sensor and/or software tampering by the vehicle owner, that have to be addressed. Demonstration VideosTwo short movies (3 and 7 minutes long) demonstrating the prototype are available for viewing:
This demo was created in June 2005. See also the following related items: Selected PublicationsSee the Publications of the Distributed Systems Group page for a full listing of our publications.
Related Student ProjectsThe following table lists corresponding student projects in our group. Note that some descriptions will be in German.
|
||||||||||||||||||||||||
|
|